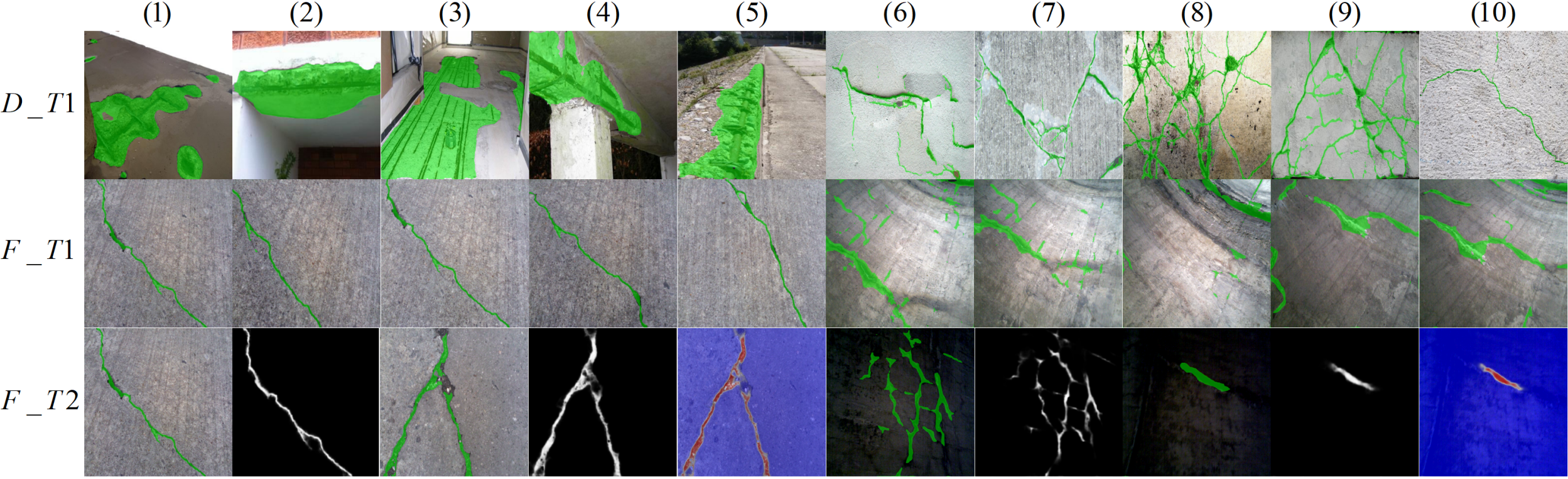
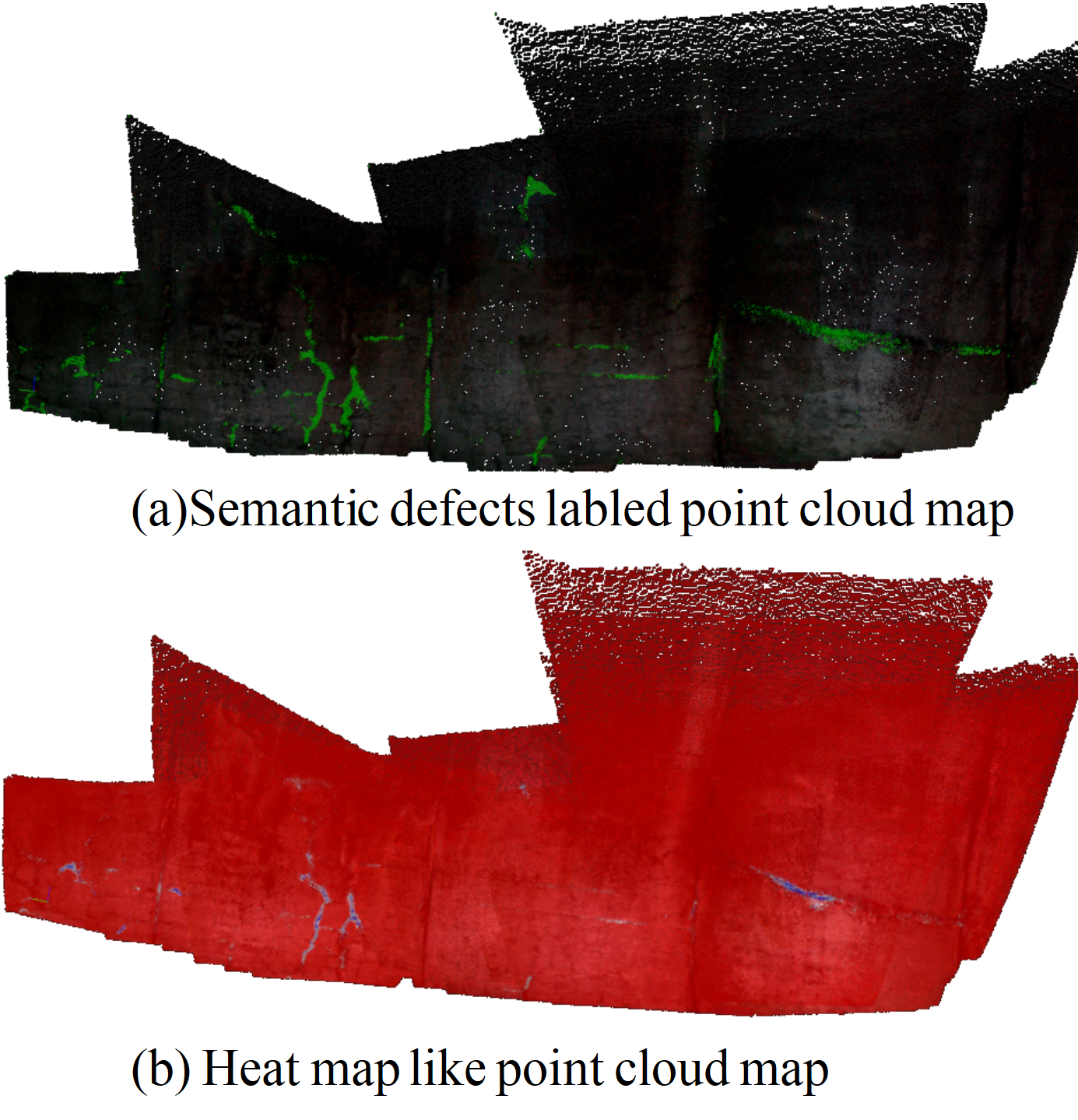
This research presents a novel inspection method using a deep neural network called InspectionNet to detects the crack and spalling defects on concrete structures performed by a novel wall-climbing robot. First, we create a pixel-level semantic dataset which includes 820 labeled images. The training on the dataset for InspectionNet is performed with 12,000 iterations for each defect type. Second, we propose an inspection method to obtain 3D metric measurement by using an RGB-D camera-based visual simultaneous localization and mapping system (SLAM), which is able to generate pose coupled key-frames with depth information. Therefore, the semantic inspection results can be registered in the concrete structure 3D model, which provides metric information for condition assessment and monitoring. Third, we present our new generation wall-climbing robot to perform the inspection task on both horizontal and vertical surfaces. Our field experiments demonstrate that our wall-climbing robot and inspection system can perform robust 3D metric inspection even in a low illuminated environment.
This InspectionNet is able to perform crack and spalling detection even in low illuminated environment.
We build a metric map via using SLAM based 3D registration to obstain the semantic map. This is the first work so far toward metric information for inspection using such visual inspection system.
The work of this research has been summarized and submitted to:
- L. Yang, B. Li, G. Yang, Y. Chang, Z. Liu, B. Jiang, J. Xiao. “Deep Neural Network based Visual Inspection with 3D Metric Measurement of Concrete Defects using Wall-climbing Robot”, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019).
- > - L. Yang, B. Li, G. Yang, Y. Chang, Z. Liu, B. Jiang, J. Xiao. “Deep Visual Inspection with 3D Metric Reconstruction”, IEEE RAL, Under Review.