We address the task of enable unmanned vehicles to explore in cluttered environment with Sampling Based Algorithm, especially Rapidly-exploring Random Tree. First, we proposed a gauassian distribution based ellipse (2D, or ellipsoid 3D) modeling approach to perform environment representation. The gaussian-ellipse model enable a virtual-force like vectorized information to guid the sampling fo random exploration. Second, we introduced a bidirectional potential field (BPF) to redistribute each newly sampled state, such that the in-collision samples can be redistributed for extension. The common potential field is a combination of goal biasing and obstacle respulsion, which does not help with a higher efficiency over narrow corridor. The proposed BPF is able to re-generate sampling around obstacle if collision occurred, where the distance toward obstacle using gaussian model acts a inverse factor for redistribution.
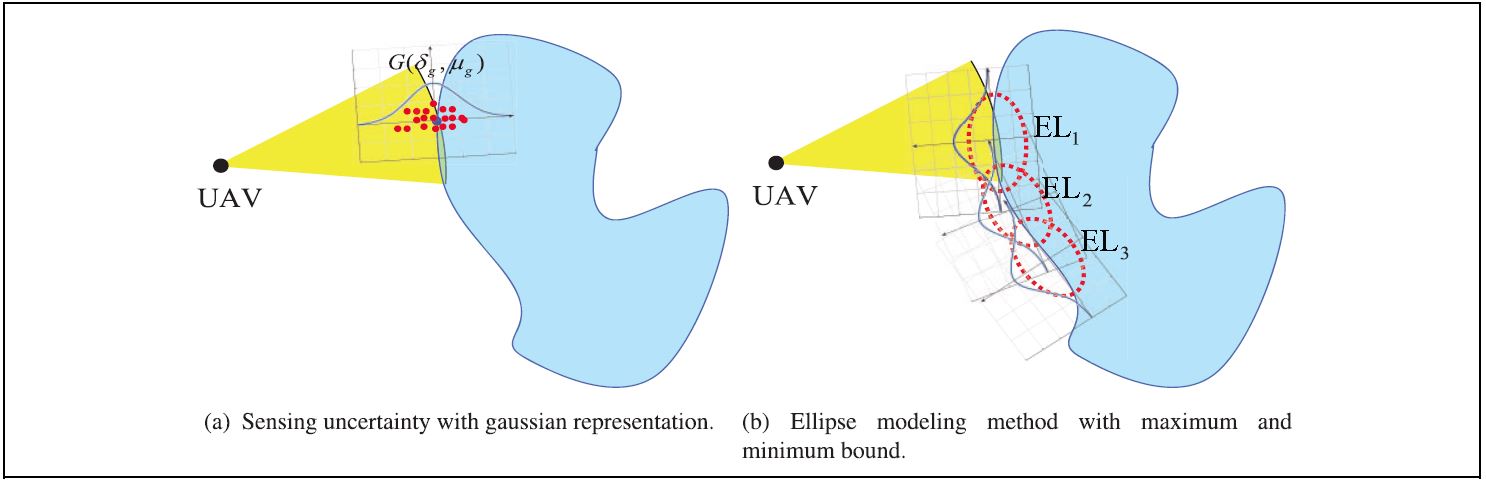
Illustration of gaussian-ellipse model around obstacle surface, where the gaussian model parameters are decided by the sensor model:
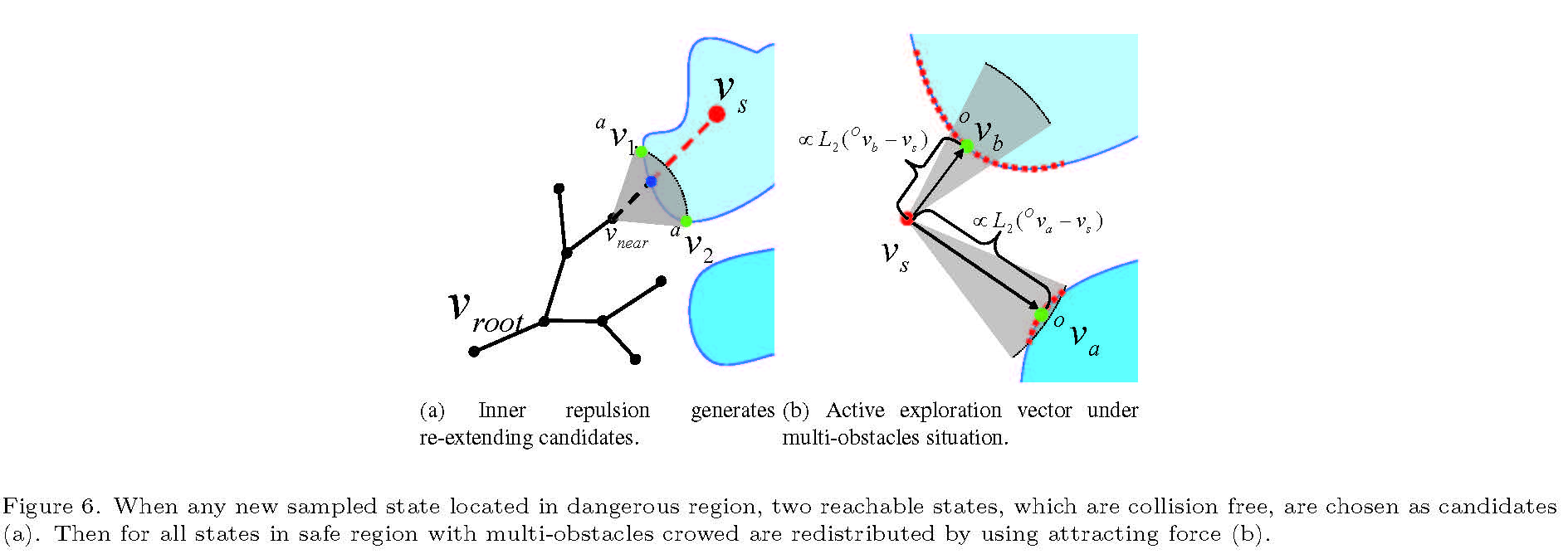
To enable the using of obstacle information, especially the narrow corridor region in cluttered environment, BPF introduces internal repulsion and external attraction only for obstacle. The BPF performs re-generation around collision region, and deploys re-disbution to enable large safety envelop.
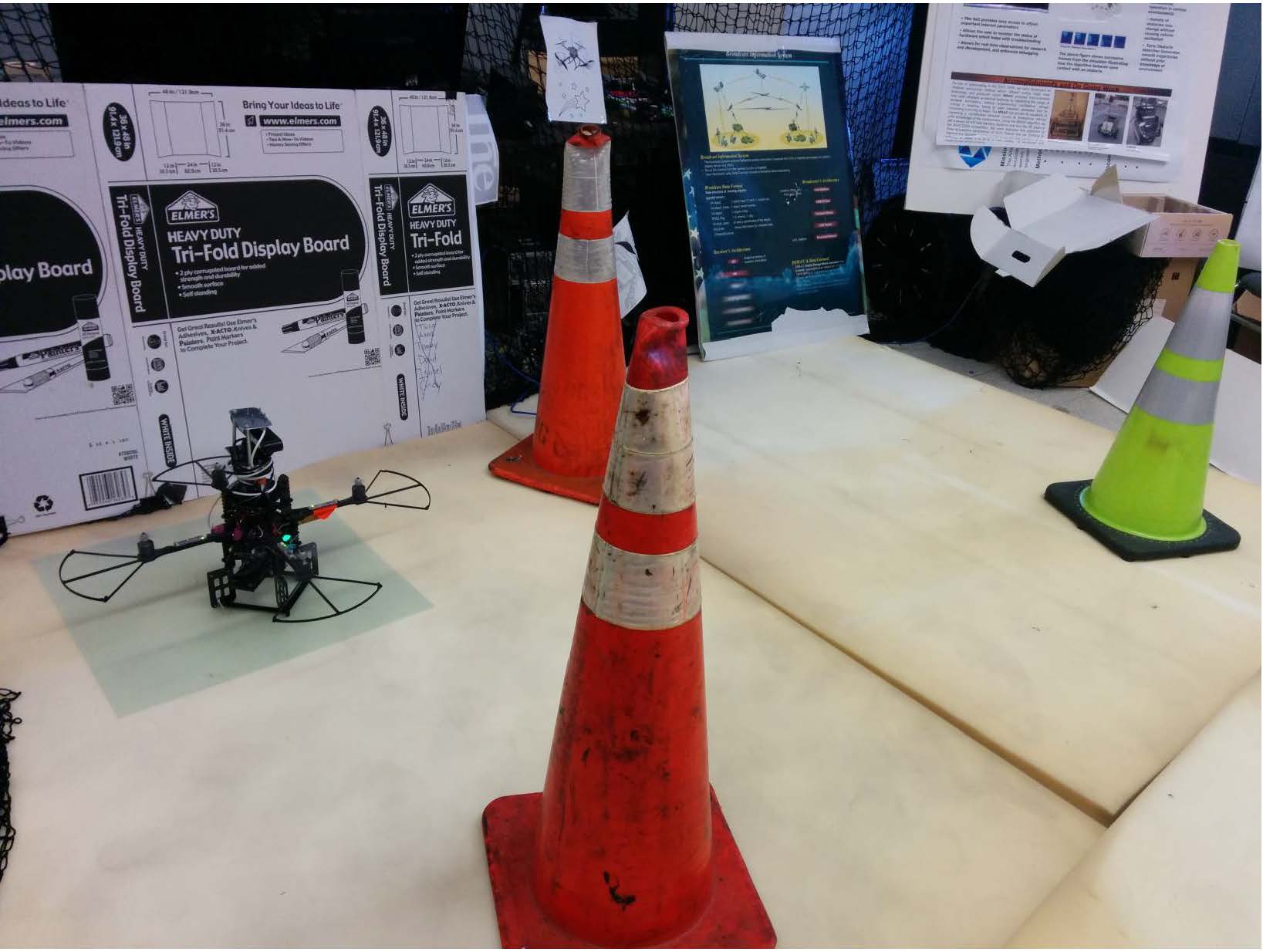
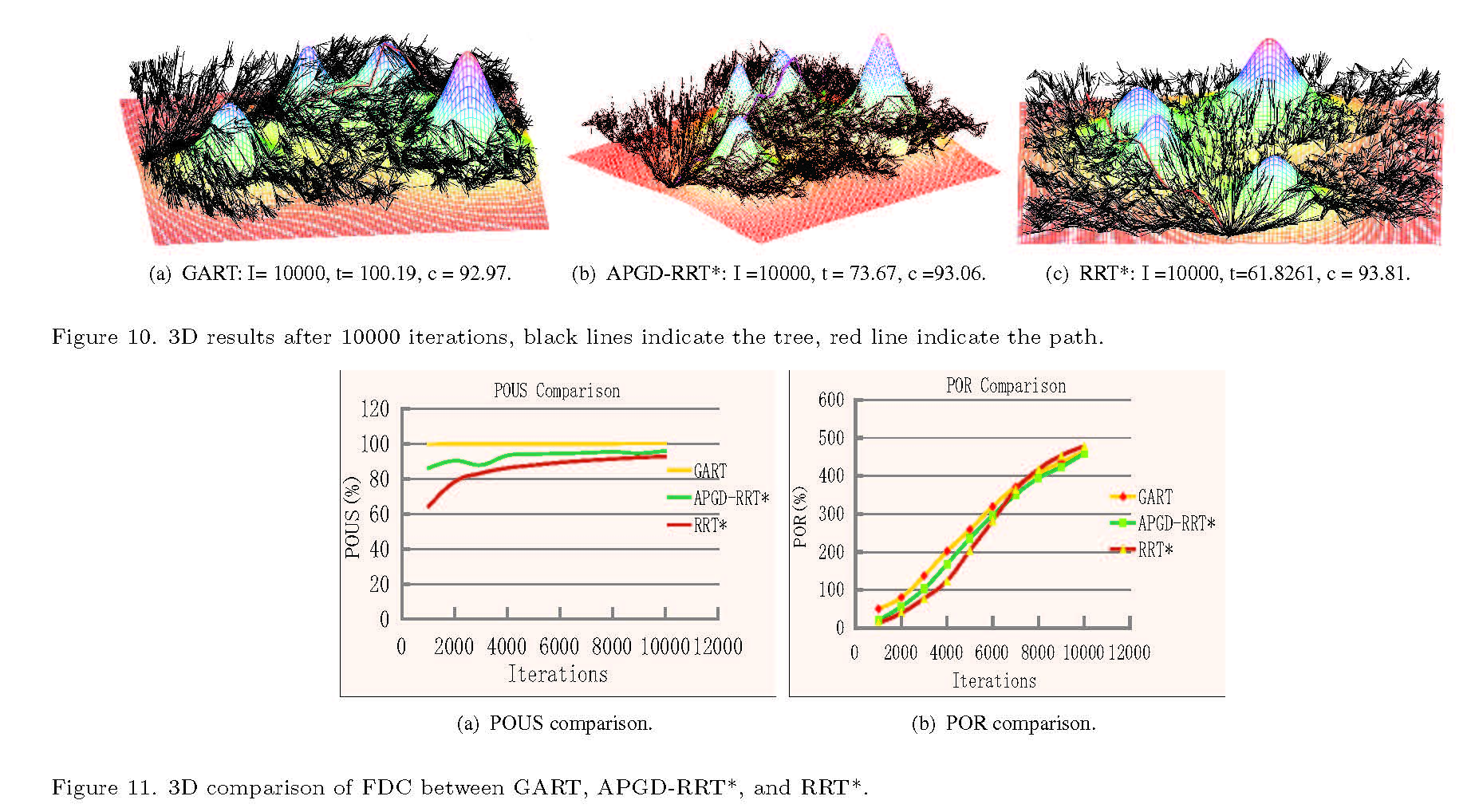
We show some comparisons with currently successful algorithms and one real test.
If you interest, please check the following papers:
- [1] L. Yang, J. Xiao, J. Qi, L. Yang, L. Wang, and J. Han. GART: An environment-guided path planner for robots in crowded environments under kinodynamic constraints. International Journal of Advanced Robotic Systems, vol.13, no. 6, pp:1 ~ 12, 2016.
- [2]L. Yang, D. Song, J. Xiao, J. Han, L. Yang, Y. Cao. Generation of Dynamically Feasible and Collision Free Trajectory by Applying Six-Order Bezier Curve and Local Optimal Reshaping. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015).
- [3]L. Yang, J. Qi, Z. Jiang, D. Song, J. Han, and J. Xiao, “Guiding Attraction based Random Tree Path Planning under Uncertainty: Dedicate for UAV”, IEEE Int. Conf. on Mechatronics and Automation (ICMA2014), Tianjin, China, Aug.3~6, 2014. (Best Student Paper Award).
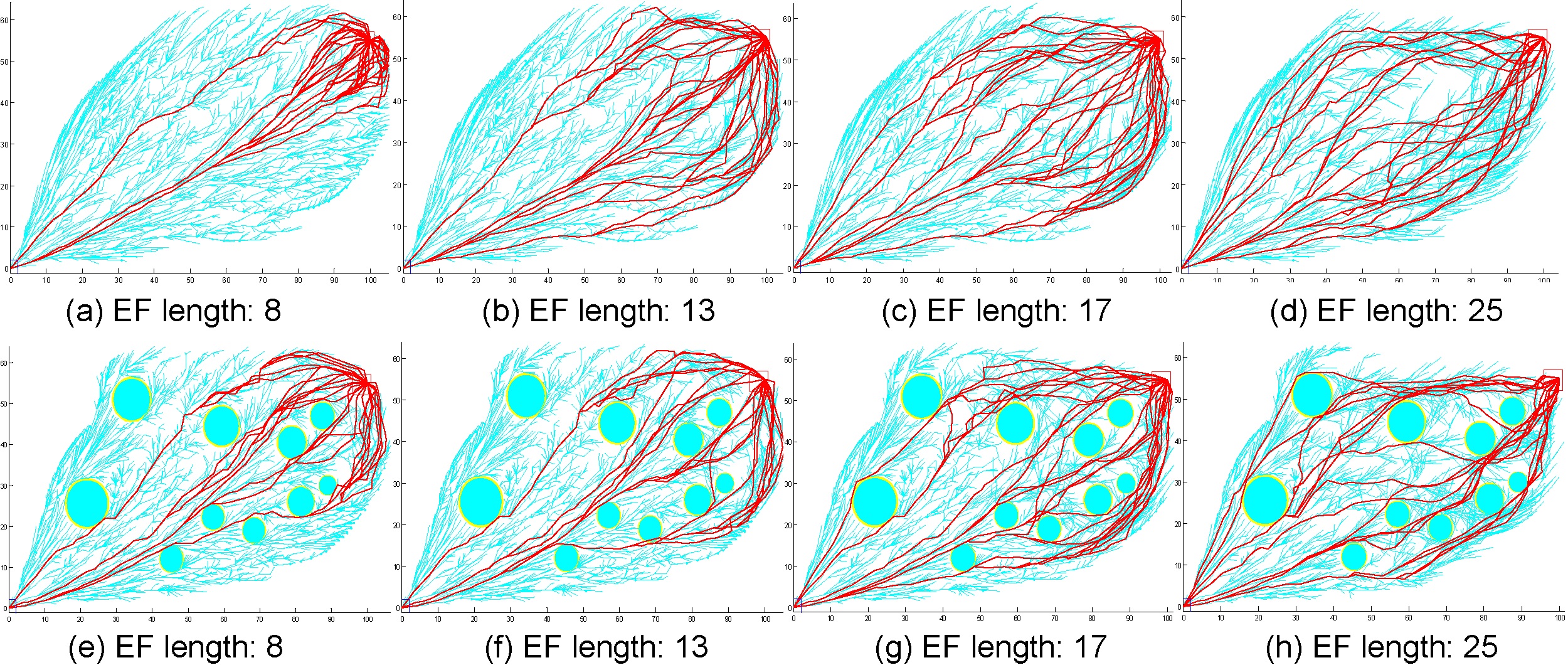
Our latest research has been invited to be published in Kinematics, InTech Press. We proposed a multi-paths planner for online obstacle avoidance, which introduces a “Extending-forbidden” method to shift the extending resource for multiple paths generation.
Illustration of multi-path generation:
Also, we proposed a online visible path connection for switching approach for agile obstacle avoidance:

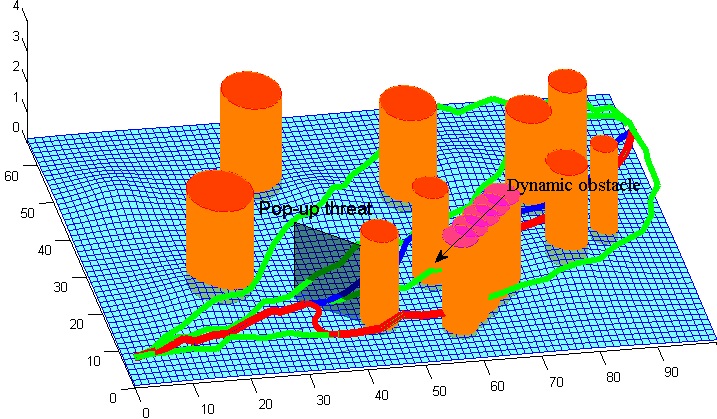
The 3D demo is illustrated: